
About Me
- 有田朋樹 / Tomoki Arita
- 東京大学 技術経営戦略学専攻 松尾・岩澤研 D1
- ロボティクス・機械学習分野
- 慶應義塾大学 理工学研究科 修了
- 慶應理工 機械工学科 → システム統合工学専修
- 制御工学・マルチエージェント分野
- Part-time engineer at GMO Various Robotics Inc.
- Ongoing
- 自動運転,SLAM, etc.
- Research Asssistant at AIST(産業技術総合研究所)
- June 2025 → March 2026
- マルチエージェント経路計画.
- 未踏IT'24 (落合陽一PM)
- June 2024 → March 2025
- スーパークリエータ認定
- Ex Intern at Tokyo Robotics Inc.
- April 2022 → April 2024
- マルチエージェント経路計画,点群認識,模倣学習,etc.
- 東京大学 技術経営戦略学専攻 松尾・岩澤研 D1
Projects / Honors
有田朋樹,和田唯我,機械学習に基づく中山間地域向け農業用散布ドローン群,2024年度未踏IT人材発掘・育成事業,2024.
Tomoki Arita,Keisuke Okumura,Local Guidance for Configuration-Based Multi-Agent Pathfinding,Proceedings of AAAI Conference on Artificial Intelligence (AAAI),2026. pdf, github
Tomoki Arita,Keisuke Okumura,Lifelong LaCAM with Local Guidance for Lifelong MAPF,Symposium on Combinatorial Search (SoCS),2026. pdf, github
Tomoki Arita,Toru Namerikawa,Probabilistic Multi-Agent Pose Graph Filtering on SE(3) via Distributed ADMM and Stein Particle Gradient Descent,SICE Journal of Control, Measurement(JCMSI),2025.site
Tomoki Arita,Toru Namerikawa,Feature-Driven Field-of-View Overlap Assurance with Control Barrier Functions for Cooperative Visual Localization,The 2025 SICE Festival with Annual Conference,2025. pdf
有田朋樹,滑川徹,Stein Particle Filterを用いた単調環境における協調自己位置推定,計測自動制御学会 第12回制御部門マルチシンポジウム,2024. pdf
有田朋樹,足助零弥,農業用小型ドローンによる果樹の栽培支援,KLL-ONE 学生ビジネスコンテスト優秀賞,2024. pdf , site
有田朋樹,機械学習に基づく中山間地域向け農業用散布ドローン群,マルチエージェント・マルチロボットプランニング研究会,2024. pdf , site


Abu Dhabi Autonomous Racing League(A2RL)出場
[Infomation, Release, TGM Grand Prix, Various Robotics ] UAEで行われたフォーミュラカー自動運転レースに唯一の日本チームTGM Grand Prixのメンバーとして初出場しました.現地では主にトンネル走行時におけるLiDARマッチングによるSLAMモジュールの開発を行いました.
[AAAI2026] Local Guidance for Configuration-Based Multi-Agent Pathfinding
[arxiv, github] LG is an extension to LaCAM, introducing local guidance — a mechanism that supplies each agent with spatiotemporal hints during multi-agent pathfinding (MAPF). While global guidance provides coarse, static information about congestion mitigation, local guidance dynamically constructs agent-wise short-horizon plans to better handle local bottlenecks and congestion in real-time.
[SoCS2026] Lifelong LaCAM with Local Guidance for Lifelong MAPF
[arxiv, github] LLLG brings local guidance to a receding-horizon framework for lifelong multi-agent pathfinding. It supplies agents with informative spatiotemporal cues to reduce congestion, improve short-horizon coordination, and maintain high throughput in dense real-time LMAPF environments.

機械学習に基づく中山間地域向け農業用散布ドローン群
2024年度未踏IT人材発掘・育成事業にて落合陽一PMに採択頂きました.
未踏会議2024登壇 & LT
"蜂を機械化するAgriswarmの開発"
未踏会議に2024年度未踏IT採択者代表として登壇 & LTさせて頂きました.

Feature-Driven Field-of-View Overlap Assurance with Control Barrier Functions for Cooperative Visual Localizationpython
Tomoki Arita,Toru Namerikawa,The 2025 SICE Festival with Annual Conference,2025.
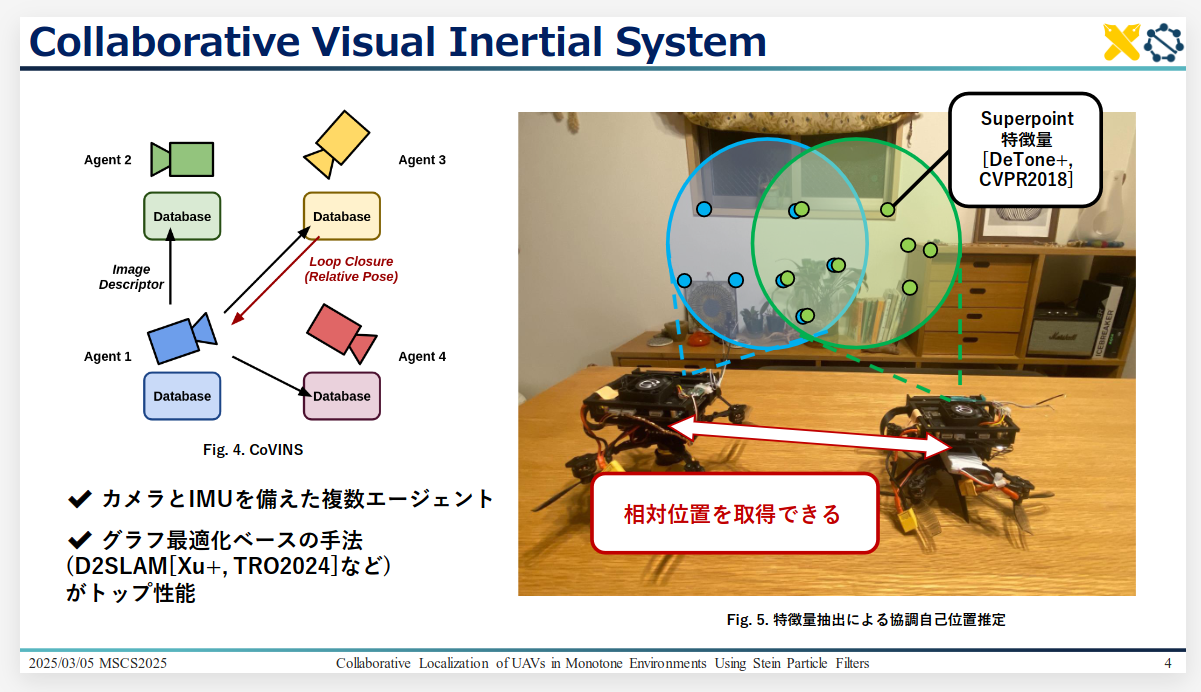
Stein Particle Filterを用いた単調環境における協調自己位置推定roscudac++
有田朋樹,滑川徹,計測自動制御学会 第12回制御部門マルチシンポジウム,2024.

農業用小型ドローンによる果樹の栽培支援
有田朋樹,足助零弥,KLL-ONE 学生ビジネスコンテスト優秀賞,2024.

機械学習に基づく中山間地域向け農業用散布ドローン群
マルチエージェント・マルチロボットプランニング研究会 2024
未踏IT'2024の内容について発表させて頂きました.
Works
- WAGMI Music: WAGMI Music is web3 digital agent and protect the right of artist with the power of blockchain.javascriptsolidity
[web3 app] WAGMI Musicjavascriptsolidity
WAGMI Music is web3 digital agent and protect the right of artist with the power of blockchain.
Blog
マッチングアプリ, ヴィジョン, 24歳, 多動, 戦略, ミクロとマクロ

草熱とドローンnote22
草熱(くさいきれ)という言葉は,生い茂った草が日光に照りつけられて発する熱気と匂いのこと指すそうだ.福島のキウイ農園に帰ると,この草熱を感じる.この匂いが.なぜ自分がここ数年福島でキウイ栽培に関わっているか考えるきっかけになりそうだと思い巡らした.

Dynamic NFTを作る(決定版)zennsolidity56
ブロックチェーン上で動くスマートコントラクトは,そのままでは外部から情報を取得することができません.情報を得るためには,オラクルと呼ばれるレイヤーを利用して,オフチェーンとオンチェーンの橋渡しをする必要があります. 本記事では,分散型オラクルネットワークであるChainlinkを利用して,OpenSeaからユーザー情報を取得し, NFTの画像として表示する会員証NFTの作り方を紹介します. ちなみに,このように外部から情報を受け取って動的に変化するNFTは,DynamicNFTと呼ばれます.
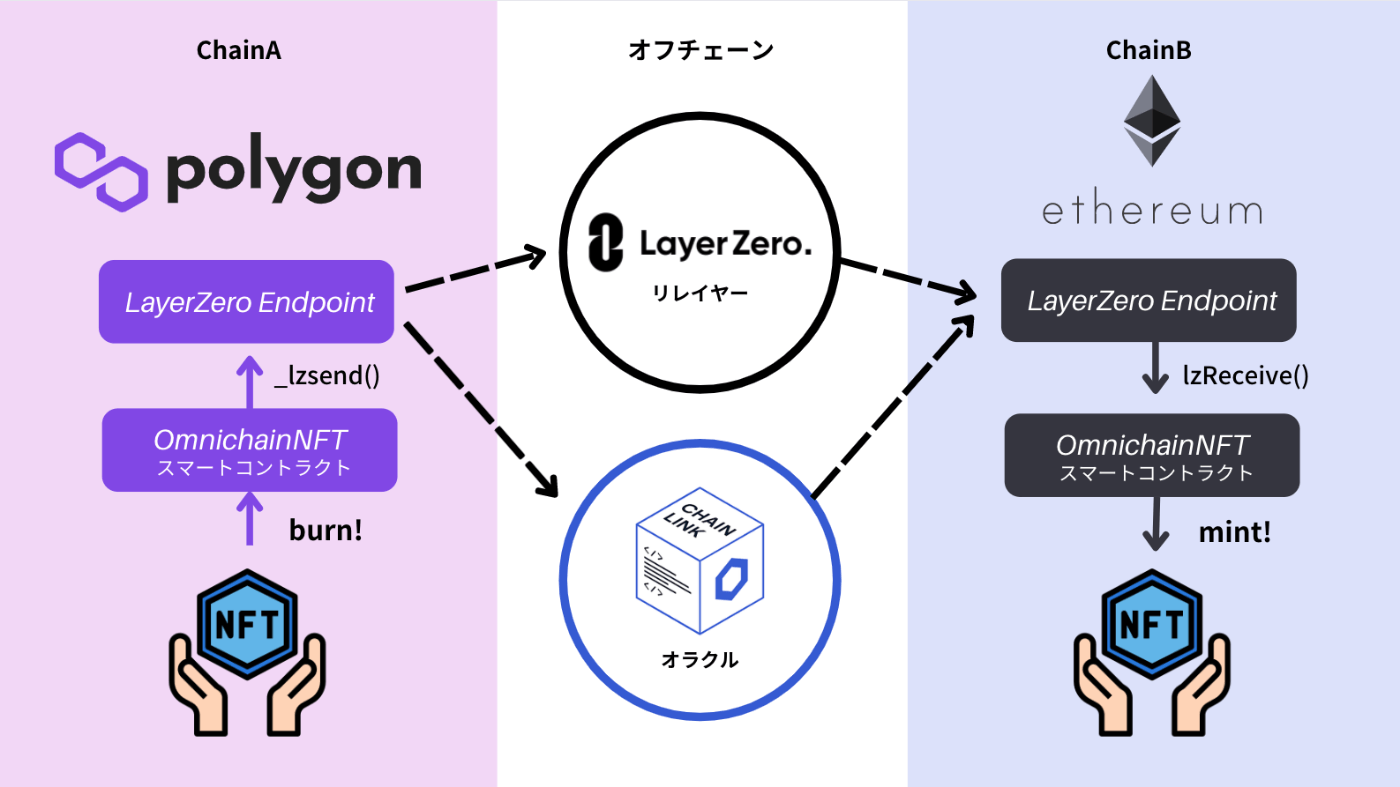
Omnichain NFTを作る(決定版)zennsolidity22
Ethereum,Polygon,Solanaなど,ブロックチェーンには様々な種類がありますが. 異なるチェーン上に同一のトークンを持ち込むことはできません.そのため資産を異なるチェーンに移動する際は,主にブリッジという仕組みが用いられます.ブリッジについてはわかりやすい記事がすでに存在するのでこちらをご覧ください.
言外の言に依って理外の理に依らないinstagram1000+
近代から日本のメディアとして君臨した新聞は、海外から「新しい日本の現人神(アラヒトガミ)」と評された。 あらゆる国の新聞は、そこが独裁国家でもない限り報道者としての立場を打ち出す。物事を見る視点を定めなければ、事実に対して公正であるとか、不当であるといった判断を下せるはずがないからだ。しかし、日本の新聞、特に一般紙においてはこれがほとんど見られない。というのが日本新聞の現人神たる理由だろう。